This is an old revision of the document!
Correct operation of our ball manager tower requires detecting when a “cargo” game piece (ball) has been collected by the intake, and delivered to a position just below the shooter flywheels.
Early Prototyping
We first tried using a Rev Color Sensor V3 to both detect ball presence and its color. The V3 color sensor incorporates an infrared (IR) detector that sometimes would detect either ball, but it wasn't quite reliable.
We also considered using an Adafruit break-beam sensor, both in break-beam and reflective mode.
Banner Engineering sensor
Friends on team 888 donated a few of these sensors. They're commercial proximity sensors that operate by detecting infrared light reflected back by an object. Same general idea as the adafruit sensors in reflective use, but these are nearly insensitive to stray IR, such as sunlight. They also have adjustable sensitivity. The exact part number that we're using is QS18VP6DQ8-79688
More info on the sensor: https://www.bannerengineering.com/us/en/products/part.66460.html
The difficulty is that these sensors operate on 10-30 volts, and that most of those we recieved are “PNP” style, in which the outputs are switched to the positive supply when active. A stable +12v supply is easily obtained with a VRM, but switched +12v is no good for input to a roboRIO DIO input.
Here's the circuit we came up with to interface the +12v sensor output to the RoboRIO:
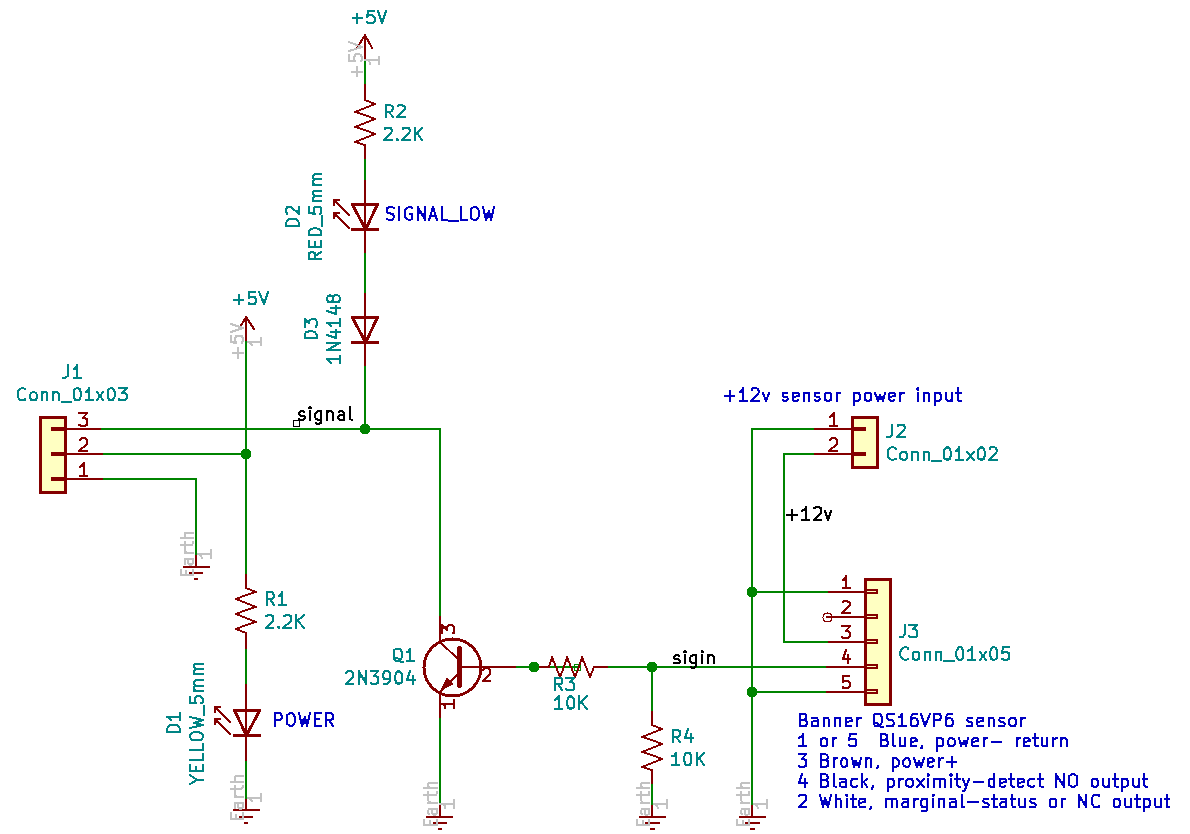
LEDs D1 and D2 and resistors R1 and R2 are basicly our DIO test board.
The banner sensor's cable is either directly soldered to the J3 pads, or prepped with a 5-pin AMPMODU female connector to mate with a 5-pin male header.